EtherCAT: Высокопроизводительная промышленная связь
EtherCAT (Ethernet для технологии автоматизации управления) — это протокол связи Ethernet в реальном времени, разработанный компанией Beckhoff Automation. Он обеспечивает превосходную производительность по сравнению с любой другой полевой шиной для приложений управления движением.
Принцип работы
EtherCAT использует уникальный принцип, называемый «обработка на лету»:
- Мастер отправляет по сети один кадр Ethernet.
- Каждый ведомый (кодер, привод, ввод-вывод) считывает свои собственные данные и вставляет свой ответ в кадр ПОКА кадр проходит через него.
- Последний ведомый отправляет кадр обратно ведущему.
- Полный цикл на 100 узлов занимает всего ~100 мкс.
- Линия (последовательное подключение): каждое устройство имеет два порта RJ45 (ВХОД и ВЫХОД). Кабель Ethernet проходит от одного к другому.
- Звезда, дерево, кольцо: поддерживается через коммутатор или соединение EtherCAT.
- Расстояние между узлами: до 100 м со стандартным кабелем Ethernet Cat.5e.
- Время цикла: < 100 мкс для сотен узлов.
- Джиттер: < 1 мкс (детерминированный)
- Диапазон: 100 Мбит/с (полный дуплекс)
- Синхронизация: Распределенные тактовые сигналы (постоянный ток) с джиттером < 100 нс между подчиненными устройствами.
- Однооборотное (13 бит) и многооборотное (14 бит) абсолютное положение.
- Скорость рассчитывается внутри
- Настраиваемая предустановка положения
- Полная диагностика (внутренняя температура, состояние подшипников, ошибки)
- Распределенные часы для многоосной синхронизации.
- Простое подключение кабелей: всего один кабель Ethernet для передачи данных и питания (с EtherCAT P).
- Встроенная диагностика: каждый кодировщик сообщает о своем состоянии здоровья.
- Удаленная параметризация: разрешение, предустановка, направление настраиваются с помощью ПЛК.
- Индустрия 4.0: прямая интеграция с системами SCADA и MES.
- Экономия затрат: Нет специального кабеля энкодера, нет модуля SSI в ПЛК.
- Beckhoff TwinCAT: встроенная интеграция
- Siemens S7-1500: через ведомый модуль EtherCAT
- Codesys: основная среда выполнения EtherCAT.
- Linux: Мастер EtherCAT с открытым исходным кодом (IgH)
Топология
Производительность
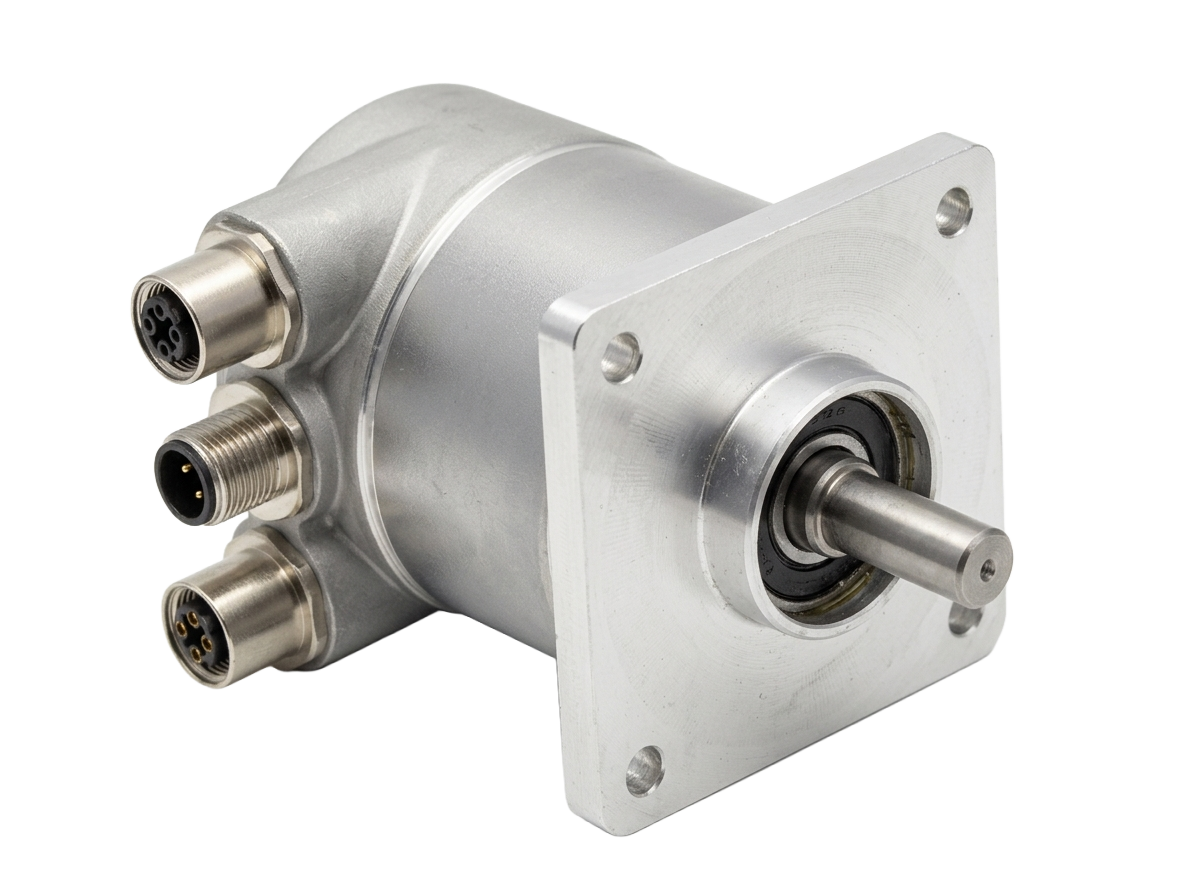
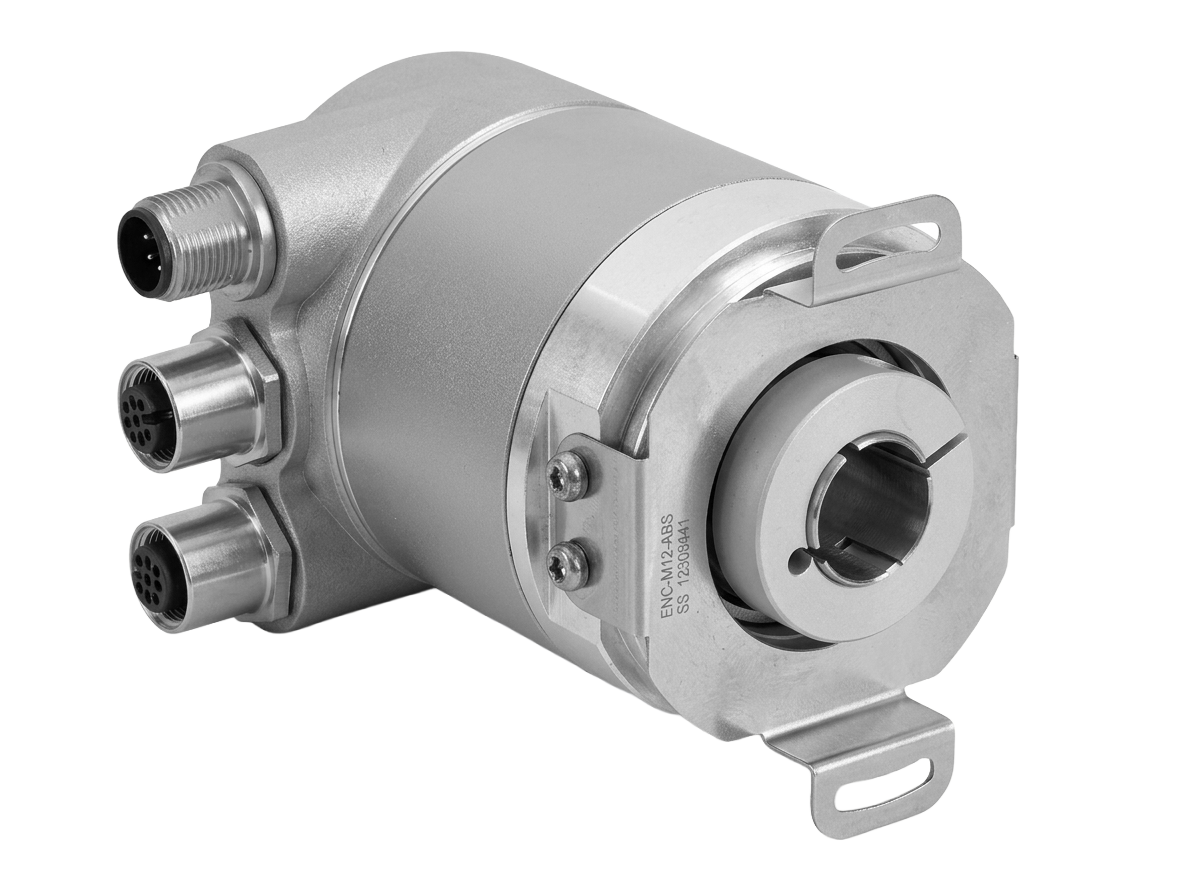
Кодер Italsensor EtherCAT
Энкодеры Italsensor со встроенным EtherCAT (серии TSM-ETHCAT и TSML-ETHCAT) реализуют профиль CoE (CAN over EtherCAT) с: