EtherCAT:高性能工业通信
EtherCAT(Ethernet for Control Automation Technology)是倍福自动化开发的实时以太网通信协议。 它为运动控制应用提供了优于任何其他现场总线的性能。
工作原理
EtherCAT 使用一种称为“动态处理”的独特原理:
- 主设备通过网络发送单个以太网帧
- 每个从站(编码器、驱动器、I/O)读取自己的数据,并将其响应插入到帧中,同时帧通过它
- 100 个节点的完整周期仅需约 100 μs
- 线路(菊花链): 每个设备都有两个 RJ45 端口(IN 和 OUT)。 以太网电缆从一处延伸到另一处。
- 星形、树形、环形:通过 EtherCAT 交换机或连接点支持
- 节点之间的距离: 使用标准 Cat.5e 以太网电缆可达 100 m
- 周期时间: < 100 μs(数百个节点)
- 抖动: < 1 μs(确定性)
- 频段: 100 Mbit/s(全双工)
- 同步: 分布式时钟 (DC),从设备之间抖动 < 100 ns
- 单圈(13 位)和多圈(14 位)绝对位置
- 内部计算速度
- 可配置的位置预设
- 完整的诊断(内部温度、轴承状态、错误)
- 用于多轴同步的分布式时钟
- 布线简单: 只需一根以太网电缆即可用于数据 + 电源(使用 EtherCAT P)
- 集成诊断: 每个编码器报告自己的健康状态
- 远程参数化:分辨率、预设、方向可由PLC配置
- 工业4.0:与SCADA和MES系统直接集成
- 节省成本: 无需专用编码器电缆,PLC中无需SSI模块
- Beckhoff TwinCAT: 本机集成
- 西门子 S7-1500: 通过 EtherCAT 从站模块
- Codesys: 主控 EtherCAT 运行时
- Linux: EtherCAT 主站开源 (IgH)
3.最后一个从机将帧发送回主机
拓扑
性能
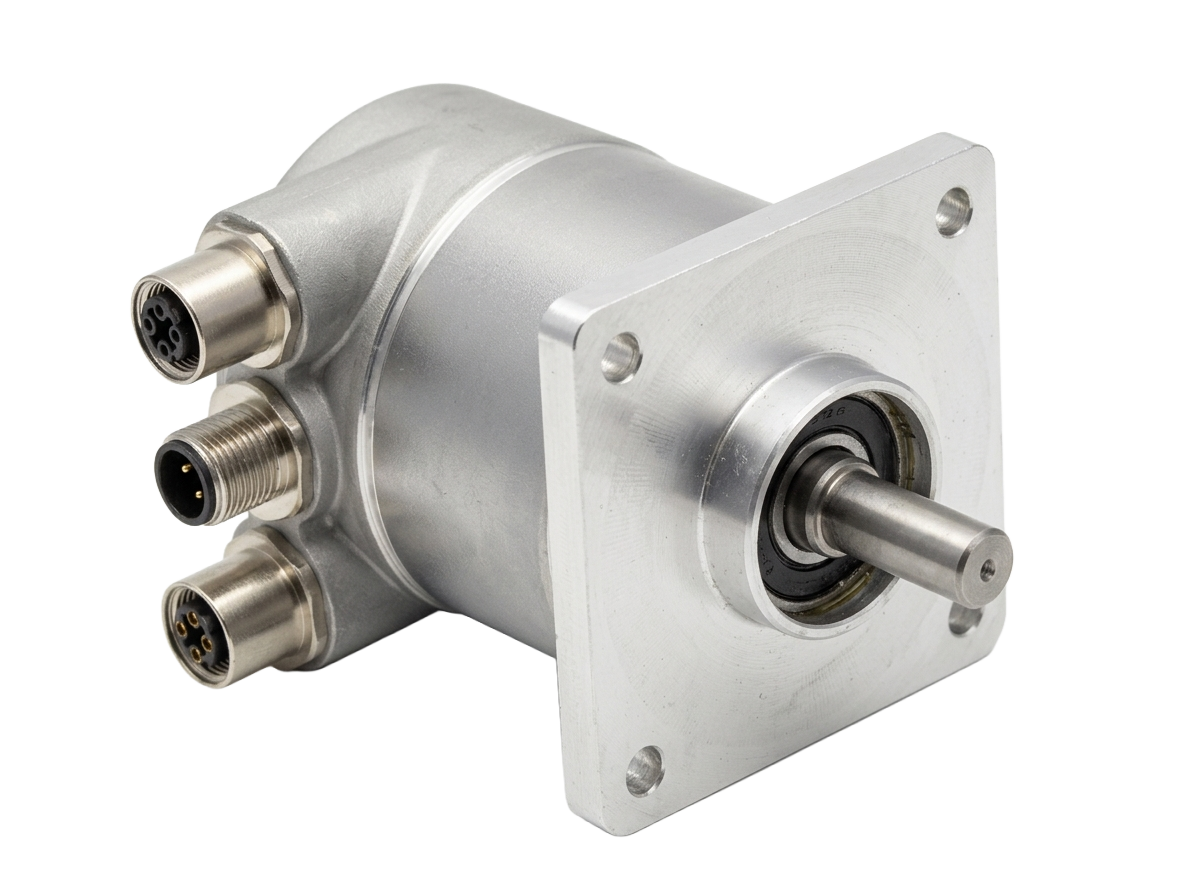
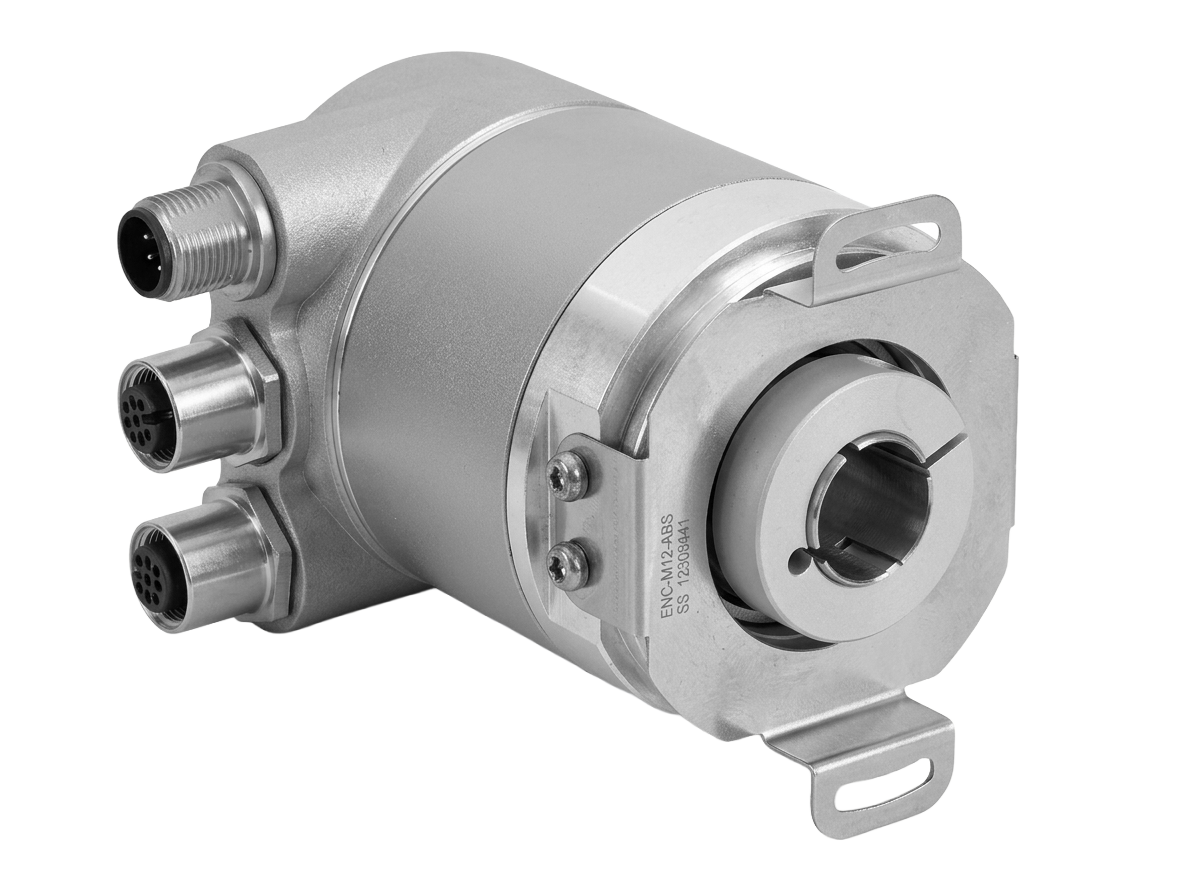
Italsensor EtherCAT编码器
具有集成 EtherCAT(TSM-ETHCAT 和 TSML-ETHCAT 系列)的 Italsensor 编码器通过以下方式实现 CoE(CAN over EtherCAT)配置文件: